

数日間のロボットプログラミングの活動を通し、Hくんは「センサーを活用したプログラム」を学びました。
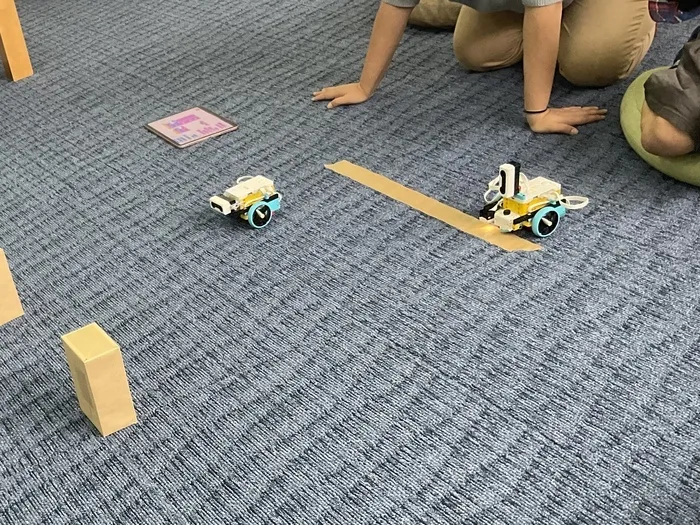
その集大成として今回は、その中の一つ「距離センサー」を用いたロボットカーで障害物レースを行いました。
ルールは2つ
①距離センサーを組み込んだロボットカーを1つ自由に作る
②センサーを活用して障害物を避けてゴールを目指す
過去の活動を思い返しながら、自身で工夫を凝らし
組み立てからプログラミングまでを1人で黙々こなし
走らせてみては、数センチ数ミリ単位で調整をしている姿は
まるで研究者のよう・・・。
全日程2日間で、見事ゴールに辿り着くことができました!!
その集大成として今回は、その中の一つ「距離センサー」を用いたロボットカーで障害物レースを行いました。
ルールは2つ
①距離センサーを組み込んだロボットカーを1つ自由に作る
②センサーを活用して障害物を避けてゴールを目指す
過去の活動を思い返しながら、自身で工夫を凝らし
組み立てからプログラミングまでを1人で黙々こなし
走らせてみては、数センチ数ミリ単位で調整をしている姿は
まるで研究者のよう・・・。
全日程2日間で、見事ゴールに辿り着くことができました!!